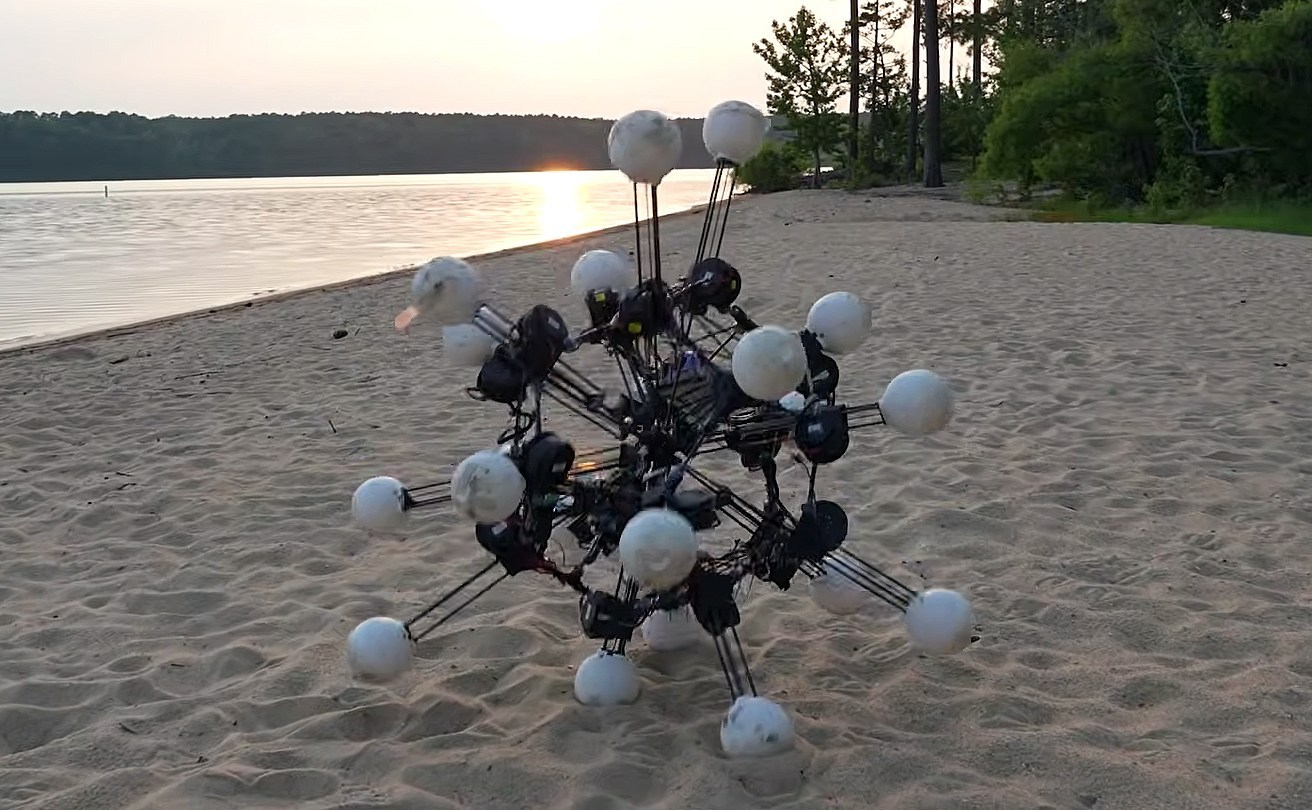
ウニ サイエンス&テクノロジー ロボット 地形 多脚 対応 知る 20本脚のウニ型ロボットがロボット工学の常識を覆す uulala 2026年6月15日 理想のロボットを数学で設計したら、ウニ似になった。20本の脚が球体から放射状に伸びたロボットが、壁を登り、砂地も密林も向きを問わず突き進む。鍵を握るのは、”あらゆる方向に均等に力を出せる”数学的な性質だ… 続きを読む 20本脚のウニ型ロボットがロボット工学の常識を覆す についてさらに読む